¿Alguna vez te has puesto a observar el movimiento de un gusano? Un gusano presenta un cuerpo flexible, alargado y puede “caminar” sin tener pies. Ahora, imagínate ¿qué pueden tener en común un gusano y un robot?
Científicos del Max-Planck Institute han desarrollado un pequeño robot basado en un imán asociado a un vehículo plástico con la capacidad de caminar, arrastrarse, saltar y nadar en ambientes complejos. Una de sus principales ventajas en el futuro es la de transportar medicación a sitios específicos donde es necesaria.
Los científicos del proyecto (del Instituto para Sistemas Inteligentes) se inspiraron en el desarrollo de maniobras que realizan ciertos organismos en la naturaleza como es el caso de los gusanos. Para ello han considerado la mecánica relacionada al movimiento de organismos de cuerpos blandos Este millibot, como han llamado a este producto, ha buscado imitar el movimiento que realizan una variedad de criaturas de cuerpos blandos como las larvas de escarabajo y orugas. Sin embargo, espermatozoides y medusas también han servido de ejemplo.
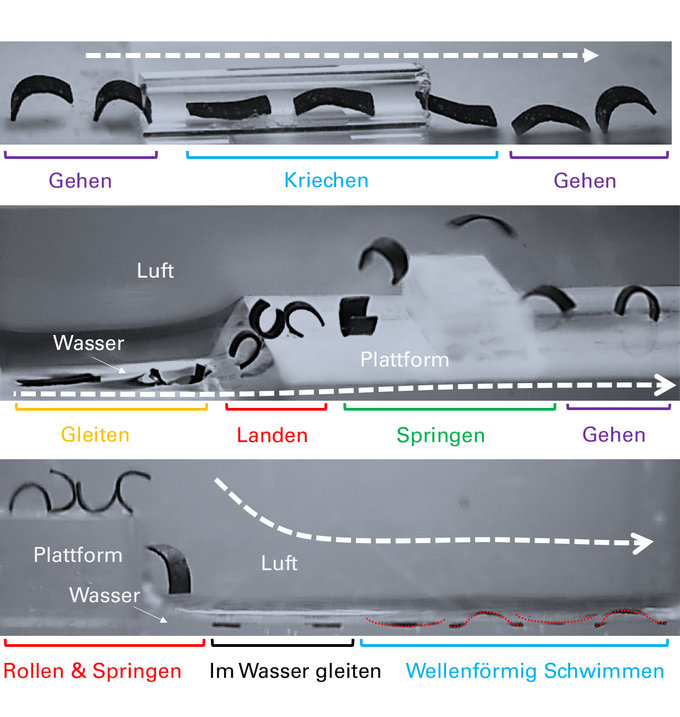
Este robot es capaz de realizar diferentes movimientos porque los científicos le han implantado micropartículas magnéticas en su estructura blanda y elástica de silicona. De esta manera resulta en un determinado patrón de magnetización. Esta estructura permite a los científicos operar y controlar al robot a partir de un campo magnético externo. El millibot puede enrollarse, caminar a través de diversas superficies, saltar obstáculos, gatear a través de tubos delgados o nadar en líquidos. Adicionalmente, puede agarrar, transportar y depositar objetos en determinadas locaciones.
Los especialistas del grupo de investigación creen que con la ayuda de muchos de estos robots, un cirujano podría tener acceso directo y control preciso en áreas del cuerpo que actualmente no es posible acceder. El objetivo principal de esta investigación es asegurar el acceso a estas regiones del cuerpo de una forma no invasiva para diagnosticar y brindar un tratamiento.
Bibliografía:
Hu, W., Lum, G., Mastrangeli, M. and Sitti, M. (2018). Small-scale soft-bodied robot with multimodal locomotion. Nature, 554(7690), pp.81-85.
Silva, N., Magalhães, J., Freire, C. and Delerue-Matos, C. (2018). Electrochemical biosensors for Salmonella: State of the art and challenges in food safety assessment. Biosensors and Bioelectronics, 99, pp.667-682.
CONOCE MÁS SOBRE BIOINGENIERIA EN UTEC Y VIVE LA INGENIERIABioingenieria