Mijail es el primer autor del paper titulado “A vacuum-powered artificial muscle designed for infant rehabilitation”, trabajo realizado durante su tesis e ingeniería mecánica.
Este paper fue desarrollado en el marco del programa del MIT International Science and Technology Initiatives (MISTI) y es parte del proyecto “Sistema robótico altamente flexible y de bajo costo para la rehabilitación de infantes de 0 a 6 meses afectados con espina bífida en Perú”. Los infantes con espina bífida durante su crecimiento presentan alteraciones motoras que pueden implicar la pérdida completa o parcial del movimiento en las extremidades inferiores. Con el propósito de reducir la carga del profesional especializado que lleva a cabo los ejercicios de rehabilitación y brindar un mayor acceso a la terapia, se diseñó un músculo artificial neumático para la rehabilitación de los infantes mediante el ejercicio de flexión y extensión de la rodilla.
“Es un paper inicial sobre nuestro primer avance en el desarrollo de un músculo artificial especialmente desarrollado para la rehabilitación de los bebés que padecen espina bífida. A largo plazo, nuestro objetivo es que pueda ser usado por un período de tratamiento de 6 meses, el cual es el tiempo en que los bebés reciben la terapia física”, comenta Mijaíl Mendoza, quien brinda más detalles a continuación:
¿De qué trata este paper?
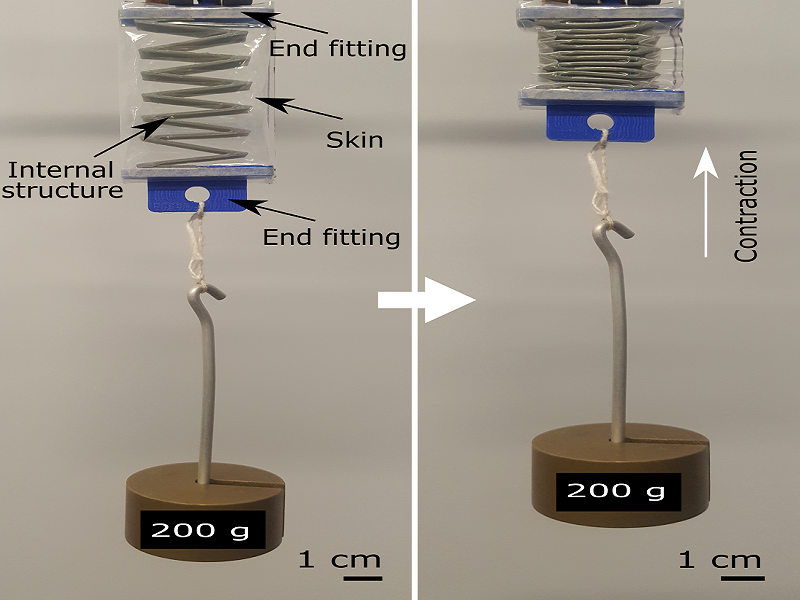
El paper analiza un músculo artificial de bajo perfil accionado por vacío, en inglés LP-VPAM, el cual se caracteriza por funcionar con magnitudes bajas de presión negativa (<-40 kPa) y ser de bajo perfil (altura de sección transversal de 10 mm). El VPAM fue diseñado considerando el ejercicio de rehabilitación realizado por el profesional especializado. En este caso, la meta del músculo artificial era obtener un rango de movimiento de 54°, el cual fue alcanzado satisfactoriamente. En la Figura 1 se puede observar al músculo artificial en funcionamiento con una carga pequeña (0.2 kg) y en un modelo de pierna que presenta las dimensiones antropométricas de un infante de 6 meses de edad, así como las masas en la extremidad inferior.
¿Qué relevancia tiene para la sociedad?
Para la sociedad, la relevancia del proyecto recae en el primer paso hacia el desarrollo de un sistema robótico altamente flexible para la rehabilitación de los infantes. Es una gran oportunidad para brindar acceso a infantes y sus familias a una terapia física adecuada.
Para ti, ¿Qué significa este proyecto?
Me siento muy alegre y agradecido con todas las personas involucradas en el proyecto, especialmente con el profesor Emir. Para mí, el paper representa un primer paso hacia el siguiente nivel en mi carrera, es un hito único pues es mi primera publicación.
Más sobre este proyecto:
Los autores de esta primera publicación son el Dr. Emir Vela, como investigador principal, el Bachiller Mijaíl Mendoza y el estudiante Diego Lavado del departamento de Ingeniería Mecánica de UTEC; también están la Dra. Ellen Roche, como co-investigadora principal, y su alumno de doctorado Samuel Gollob del Departamento de Ingeniería Mecánica del Massachusetts Institute of Technology – MIT. Además, participó el Dr. Cruz del INSN SB.
Bibliografía:
[1] M. J. Mendoza et al., “A vacuum-powered artificial muscle designed for infant rehabilitation,” Micromachines, vol. 12, no. 8, pp. 1–19, 2021.